I am using the MapMatch library for map matching. The matching itself based on GPS samples works like a charm in principle. Afterwards I plot the resulting trajectory on an OSM map. Here I noticed, that some nodes are not contained in the resulting route, but in the original map (which is not graphhopper-processed).
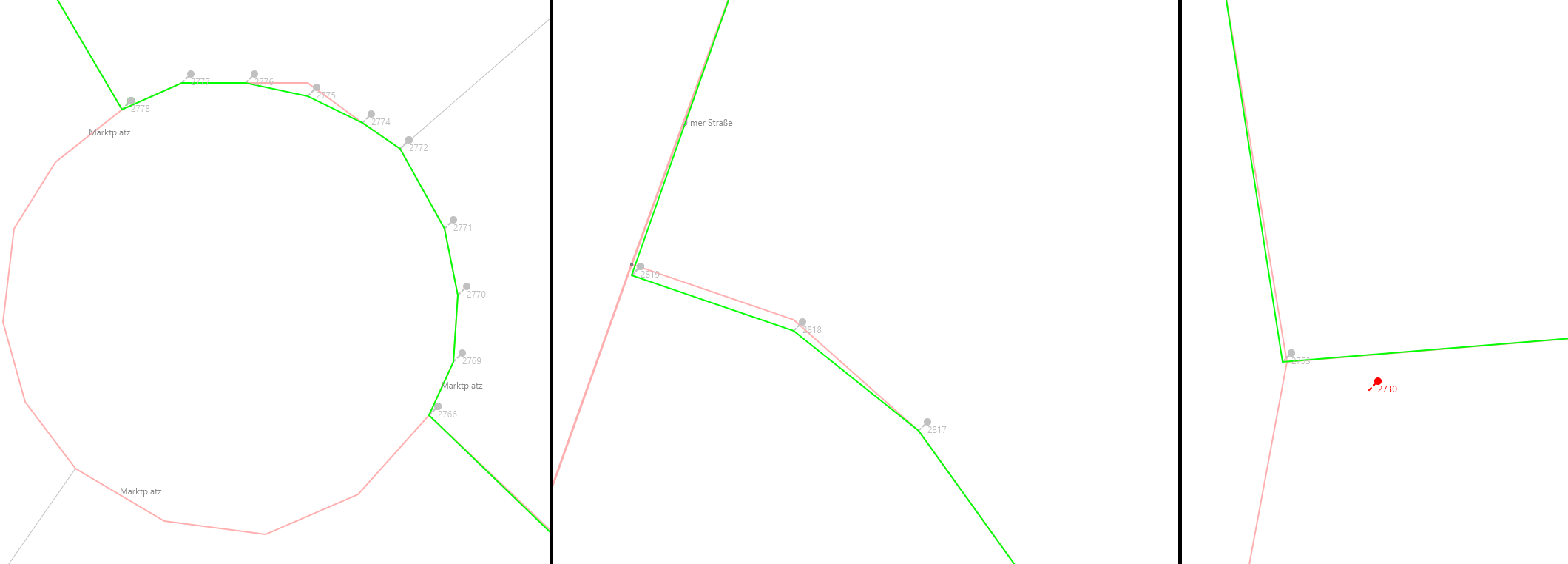
See image: red = raw gps, gray = map match result, green = connected map match recult nodes
Both maps have the same OSM map source (a local OSM file).
I played around with disabling the CH, setting the minimum network size, etc. but I get always the same results.
Thank you very much for the quick reply and the hint. I inherited the OSMReader and disabled the simplification. Maybe would be good to provide a setter for it in future?
Do you have measures with and without simplification in terms of performance and possibly quality?
Edit:
Just realized: Setting setWayPointMaxDistance(0) disables the simplification, too.
after some tesing I figured out, that by setting doSimplify = false in the OSMReader as well as simplifyResponse = false in the GraphHopper, the map matching result int roundabout in the upper picture matches the map data almost perfectly: