Hey,
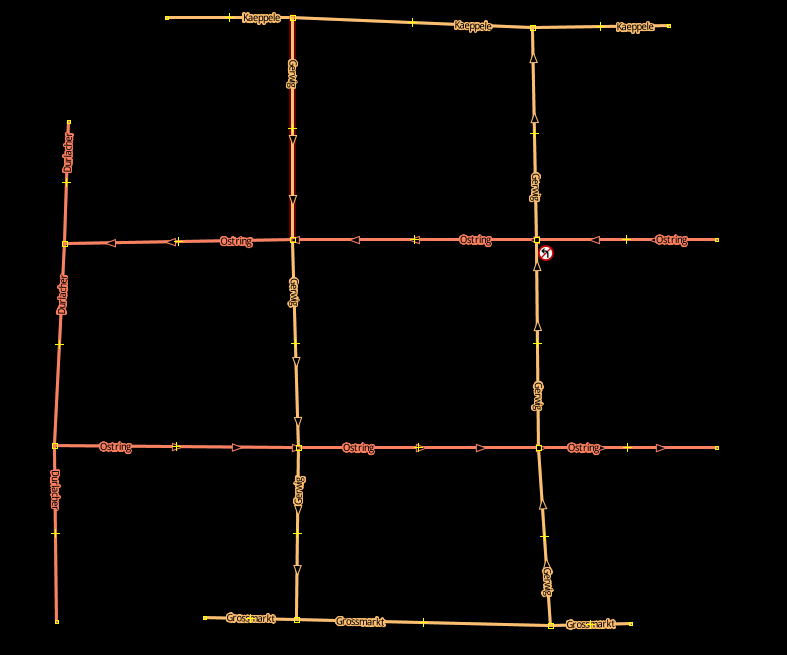
as of 7446 I try to create my own Turn Restriction example. I made an attached simple.osm file in JSOM with a turn restriction correctly displayed in JOSM:
I updated the config-example.yml with graph.flag_encoders: car|turn_costs=true and
profiles:
- name: car
vehicle: car
weighting: fastest
turn_costs: true
However, the turn restriction is not recognized in the routing:
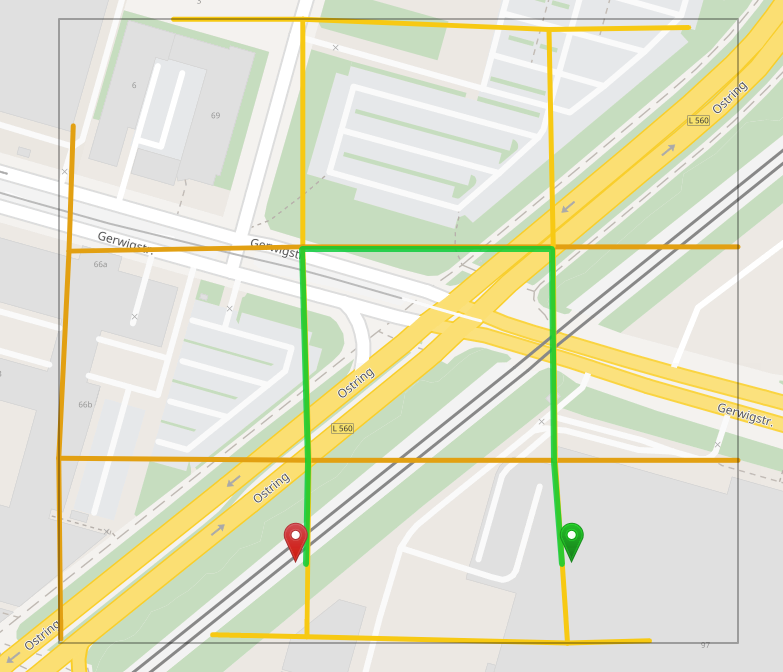
I tried it also in Java (see attached code), but it also navigates via “Ostring” instead of “Kaeppele”:
distance 123.62 for instruction: continue onto Gerwig
distance 97.94 for instruction: turn left onto Ostring
distance 123.38 for instruction: turn left onto Gerwig
distance 0.0 for instruction: arrive at destination
simple.osm
<?xml version='1.0' encoding='UTF-8'?>
<osm version='0.6' generator='JOSM'>
<bounds minlat='49.00492' minlon='8.43571' maxlat='49.00814' maxlon='8.44413' origin='JOSM' />
<node id='-138082' visible='true' lat='49.00601320632' lon='8.4378525903' />
<node id='-138083' visible='true' lat='49.00600598625' lon='8.43919538768' />
<node id='-138084' visible='true' lat='49.00600598625' lon='8.440516172' />
<node id='-138085' visible='true' lat='49.00600598625' lon='8.4414957537' />
<node id='-138086' visible='true' lat='49.00675686751' lon='8.4414957537' />
<node id='-138087' visible='true' lat='49.00675686751' lon='8.44050516546' />
<node id='-138088' visible='true' lat='49.00675686751' lon='8.43916236808' />
<node id='-138089' visible='true' lat='49.00674242759' lon='8.43790762298' />
<node id='-138090' visible='true' lat='49.00536339619' lon='8.44058221121' />
<node id='-138091' visible='true' lat='49.00752217713' lon='8.44048315239' />
<node id='-138092' visible='true' lat='49.00755827635' lon='8.43916236808' />
<node id='-138093' visible='true' lat='49.00538505666' lon='8.43918438115' />
<node id='-138094' visible='true' lat='49.00752939698' lon='8.44123159683' />
<node id='-138095' visible='true' lat='49.00718284318' lon='8.43792963605' />
<node id='-138096' visible='true' lat='49.0053778365' lon='8.43786359683' />
<node id='-138097' visible='true' lat='49.00539227682' lon='8.43867808049' />
<node id='-138098' visible='true' lat='49.00537061635' lon='8.44102247265' />
<node id='-138099' visible='true' lat='49.00755827635' lon='8.43846895631' />
<way id='-103991' visible='true'>
<nd ref='-138082' />
<nd ref='-138083' />
<tag k='highway' v='primary' />
<tag k='name' v='Ostring' />
<tag k='oneway' v='yes' />
</way>
<way id='-103992' visible='true'>
<nd ref='-138086' />
<nd ref='-138087' />
<tag k='highway' v='primary' />
<tag k='name' v='Ostring' />
<tag k='oneway' v='yes' />
</way>
<way id='-103993' visible='true'>
<nd ref='-138090' />
<nd ref='-138084' />
<tag k='highway' v='secondary' />
<tag k='name' v='Gerwig' />
<tag k='oneway' v='yes' />
</way>
<way id='-103994' visible='true'>
<nd ref='-138092' />
<nd ref='-138088' />
<tag k='highway' v='secondary' />
<tag k='name' v='Gerwig' />
<tag k='oneway' v='yes' />
</way>
<way id='-103995' visible='true'>
<nd ref='-138094' />
<nd ref='-138091' />
<tag k='highway' v='secondary' />
<tag k='name' v='Kaeppele' />
</way>
<way id='-103996' visible='true'>
<nd ref='-138095' />
<nd ref='-138089' />
<tag k='highway' v='primary' />
<tag k='name' v='Durlacher' />
</way>
<way id='-103997' visible='true'>
<nd ref='-138097' />
<nd ref='-138093' />
<tag k='highway' v='secondary' />
<tag k='name' v='Grossmarkt' />
</way>
<way id='-104013' visible='true'>
<nd ref='-138087' />
<nd ref='-138088' />
<tag k='highway' v='primary' />
<tag k='name' v='Ostring' />
<tag k='oneway' v='yes' />
</way>
<way id='-104014' visible='true'>
<nd ref='-138088' />
<nd ref='-138089' />
<tag k='highway' v='primary' />
<tag k='name' v='Ostring' />
<tag k='oneway' v='yes' />
</way>
<way id='-104017' visible='true'>
<nd ref='-138091' />
<nd ref='-138092' />
<tag k='highway' v='secondary' />
<tag k='name' v='Kaeppele' />
</way>
<way id='-104018' visible='true'>
<nd ref='-138092' />
<nd ref='-138099' />
<tag k='highway' v='secondary' />
<tag k='name' v='Kaeppele' />
</way>
<way id='-104021' visible='true'>
<nd ref='-138089' />
<nd ref='-138082' />
<tag k='highway' v='primary' />
<tag k='name' v='Durlacher' />
</way>
<way id='-104022' visible='true'>
<nd ref='-138082' />
<nd ref='-138096' />
<tag k='highway' v='primary' />
<tag k='name' v='Durlacher' />
</way>
<way id='-104025' visible='true'>
<nd ref='-138083' />
<nd ref='-138084' />
<tag k='highway' v='primary' />
<tag k='name' v='Ostring' />
<tag k='oneway' v='yes' />
</way>
<way id='-104026' visible='true'>
<nd ref='-138084' />
<nd ref='-138085' />
<tag k='highway' v='primary' />
<tag k='name' v='Ostring' />
<tag k='oneway' v='yes' />
</way>
<way id='-104029' visible='true'>
<nd ref='-138093' />
<nd ref='-138090' />
<tag k='highway' v='secondary' />
<tag k='name' v='Grossmarkt' />
</way>
<way id='-104030' visible='true'>
<nd ref='-138090' />
<nd ref='-138098' />
<tag k='highway' v='secondary' />
<tag k='name' v='Grossmarkt' />
</way>
<way id='-104033' visible='true'>
<nd ref='-138088' />
<nd ref='-138083' />
<tag k='highway' v='secondary' />
<tag k='name' v='Gerwig' />
<tag k='oneway' v='yes' />
</way>
<way id='-104034' visible='true'>
<nd ref='-138083' />
<nd ref='-138093' />
<tag k='highway' v='secondary' />
<tag k='name' v='Gerwig' />
<tag k='oneway' v='yes' />
</way>
<way id='-104037' visible='true'>
<nd ref='-138084' />
<nd ref='-138087' />
<tag k='highway' v='secondary' />
<tag k='name' v='Gerwig' />
<tag k='oneway' v='yes' />
</way>
<way id='-104038' visible='true'>
<nd ref='-138087' />
<nd ref='-138091' />
<tag k='highway' v='secondary' />
<tag k='name' v='Gerwig' />
<tag k='oneway' v='yes' />
</way>
<relation id="1" version="1">
<member type="way" ref="-104037" role="from"/>
<member type="way" ref="-104013" role="to"/>
<member type="node" ref="-138087" role="via"/>
<tag k="restriction" v="no_left_turn"/>
<tag k="type" v="restriction"/>
</relation>
</osm>
RoutingExample.java
package graphhopper_complex;
import com.graphhopper.GHRequest;
import com.graphhopper.GHResponse;
import com.graphhopper.GraphHopper;
import com.graphhopper.ResponsePath;
import com.graphhopper.config.CHProfile;
import com.graphhopper.config.Profile;
import com.graphhopper.storage.BaseGraph;
import com.graphhopper.util.*;
import com.graphhopper.config.LMProfile;
import java.util.Locale;
public class RoutingExample {
private static final String GH_LOCATION = "target/routing-algorithm-with-osm-test-gh";
public static void main(String[] args) {
String relDir = args.length == 1 ? args[0] : "";
GraphHopper hopper = createHopper(relDir + "files/simple.osm",
new Profile("car").setVehicle("car").setWeighting("fastest").setTurnCosts(true));
hopper.importOrLoad();
BaseGraph b = hopper.getBaseGraph();
b.debugPrint();
routing(hopper);
hopper.close();
}
static GraphHopper createHopper(String osmFile, Profile... profiles) {
GraphHopper hopper = new GraphHopper().setStoreOnFlush(true).setOSMFile(osmFile).setProfiles(profiles)
.setGraphHopperLocation(GH_LOCATION);
hopper.getRouterConfig().setSimplifyResponse(false);
hopper.setMinNetworkSize(0);
hopper.getReaderConfig().setMaxWayPointDistance(0);
hopper.getLMPreparationHandler().setLMProfiles(new LMProfile(profiles[0].getName()));
hopper.getCHPreparationHandler().setCHProfiles(new CHProfile(profiles[0].getName()));
return hopper;
}
public static void routing(GraphHopper hopper) {
// simple configuration of the request object
GHRequest req = new GHRequest(49.005648, 8.440601, 49.005648, 8.43912).
setProfile("car").
setLocale(Locale.ENGLISH);
GHResponse rsp = hopper.route(req);
// handle errors
if (rsp.hasErrors())
throw new RuntimeException(rsp.getErrors().toString());
// use the best path, see the GHResponse class for more possibilities.
ResponsePath path = rsp.getBest();
// points, distance in meters and time in millis of the full path
PointList pointList = path.getPoints();
double distance = path.getDistance();
long timeInMs = path.getTime();
Translation tr = hopper.getTranslationMap().getWithFallBack(Locale.UK);
InstructionList il = path.getInstructions();
// iterate over all turn instructions
for (Instruction instruction : il) {
System.out.println("distance " + instruction.getDistance() + " for instruction: "
+ instruction.getTurnDescription(tr));
}
assert il.size() == 6;
assert Helper.round(path.getDistance(), -2) == 900;
}
}
 ) doesn’t run in the same issue.
) doesn’t run in the same issue.