My goal was to enforce the routing to one direction using bearings and I expected that a route is provided in which multiple left or right turns are provided to go back to the destination, that lays in the opposite direction.
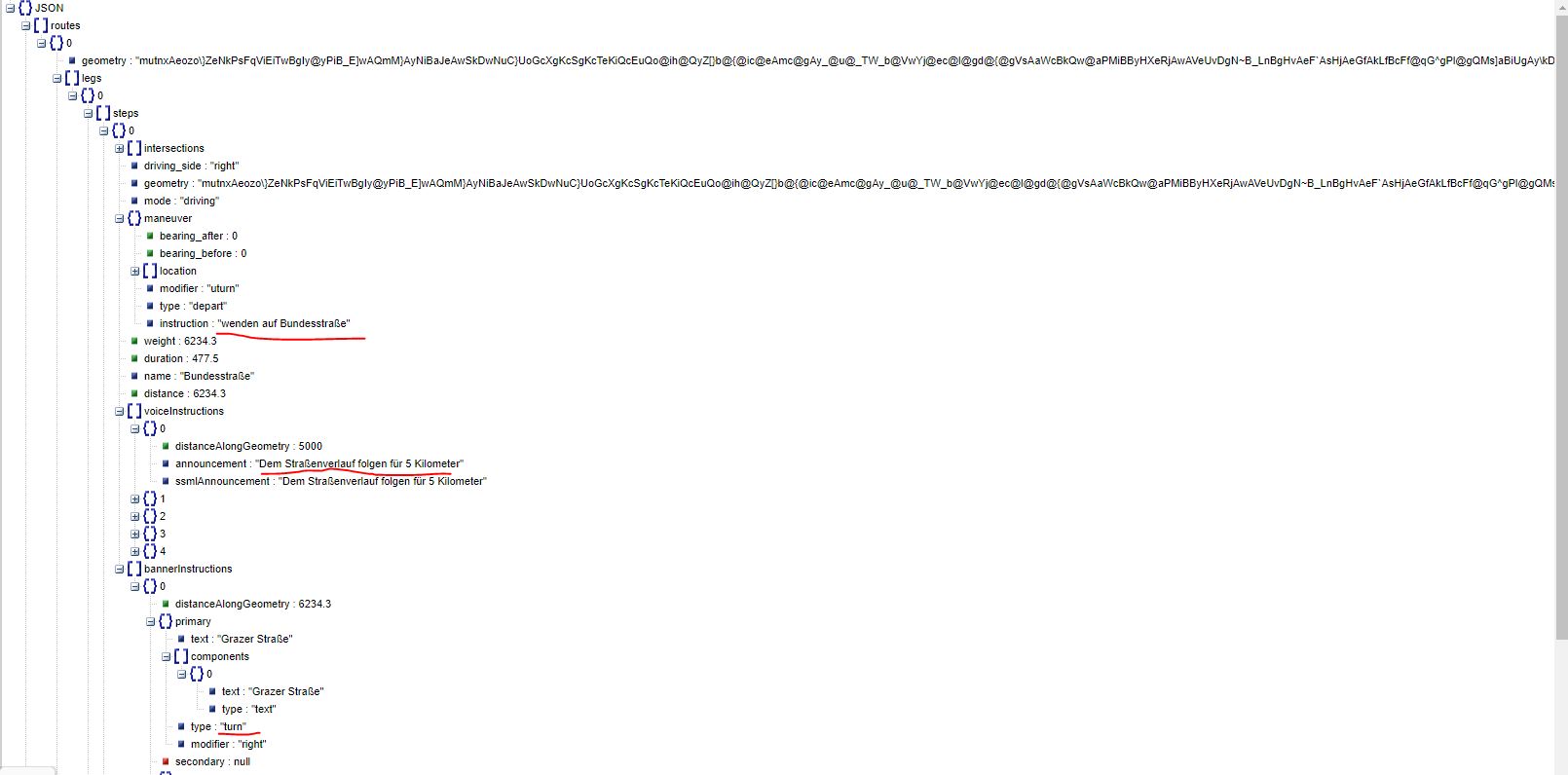
What I got is anyway a uturn as first manuever. Moreover the information about the uturn is not passed to the user in form of a banner or voice information (see attached file).
i tried to pass other parameter accepted by Mapbox V5 (like avoid_manouver_radius) but i see no changes in the results.
Graphhopper version: 7.0 Release run locally
Profile: fastest with turn cost=true and uturn cost =360
Query sent through Postman
Am I missing something?
If I try the same with the route endpoint (of course changing the parameters to use the right one) I get the expected behaviour.
I think this is a bug which could be also present for the Routing API - can you send the request you used for the Routing API? Please create an issue at Github.
I realised that also with the route endpoint the first manuver is an u-turn, so the behaviour of the navigate endpoint and route endpoint is the same, sorry for my mistake.
I still have two questions:
Why with the navigate endpoint the u-turn information is not passed in the voice and banner instructions?
2)Is there a way to enforce not doing an u-turn as fist manouver? I tried using pass_through, heading penality and uturn cost as high as 1000 but it does not seem to make any effect.
an I observed that in this case the u-turn at the intermidiate point is correctly avoided, so it seems something is strange if the u-turn is in the first manouver.
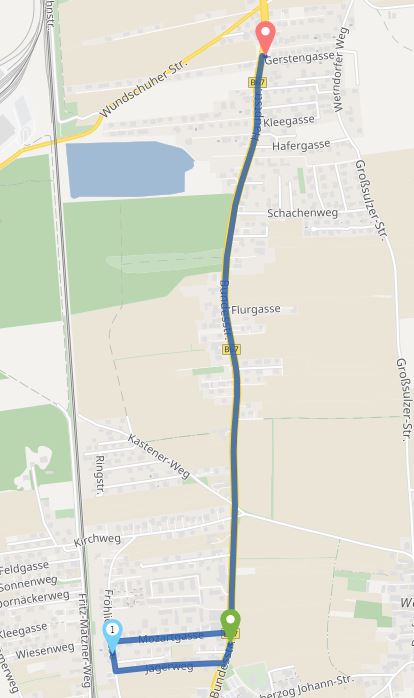
I was expecting that the route goes south and at the first occasion (left or right side road), the route continues to a side road to go north withouth an u-turn as I penalised u-turns with an extreme cost (uturn_cost =1000), as in the example in the screenshot (note: i used a waypoint to demonstarte the route that I was expecting)
If U-turns are not supported as first instruction, I can understand why it happens.
In my opinion I think anyway that the routing should avoid u-turn as first instruction as they do not make lot of sense and are not feasible for most road vehicles.