Hello.
I am trying to use graphhopper in version 6.0 to match a route with pedestrian and bike profiles. In both cases, I have no failure on the server side, but the matched route is very short and doesn’t follow all the trip nodes.
I have tried several weighting options (shortest, fastest and short_fastest) and I always get a very small matched route compared to the one I am trying to match.
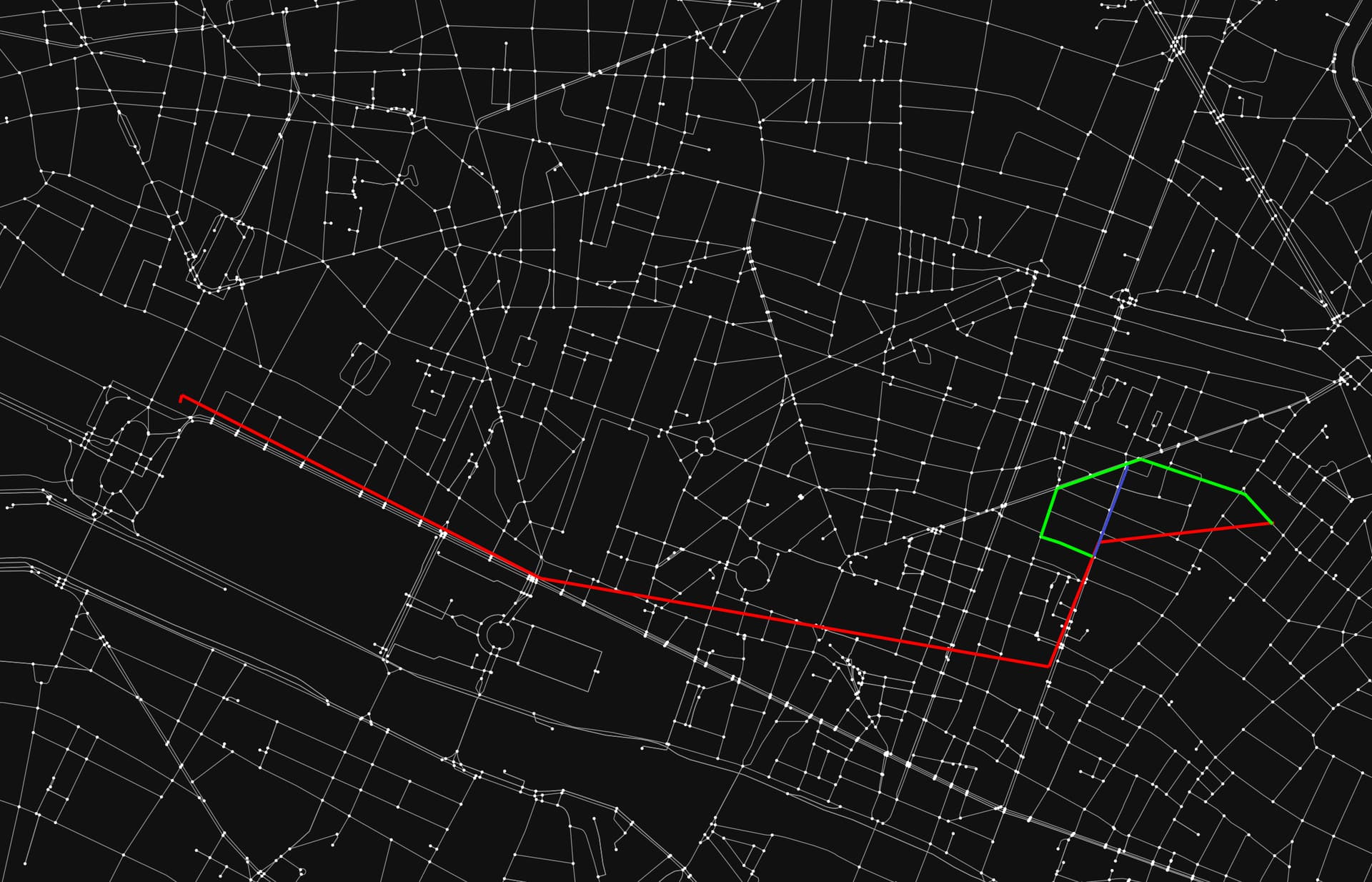
Here is a screeshot of the foot profile output (red= original trip, green=matched route):
Here are my profiles:
profiles:
- name: car
vehicle: car
weighting: shortest
- name: bike
vehicle: bike
weighting: shortest
- name: foot
vehicle: foot
weighting: short_fastest
profiles_ch:
- profile: car
- profile: bike
- profile: foot
and the gpx data:
<?xml version="1.0" encoding="UTF-8"?>
<gpx xmlns="http://www.topografix.com/GPX/1/1" xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance" xsi:schemaLocation="http://www.topografix.com/GPX/1/1 http://www.topografix.com/GPX/1/1/gpx.xsd" version="1.1" creator="gpx.py -- https://github.com/tkrajina/gpxpy">
<trk>
<trkseg>
<trkpt lat="48.86400042111182" lon="2.3607843371469666">
</trkpt>
<trkpt lat="48.86400042111182" lon="2.3607843371469666">
</trkpt>
<trkpt lat="48.86355691455583" lon="2.3547411840491885">
</trkpt>
<trkpt lat="48.86073482698218" lon="2.3530194642553046">
</trkpt>
<trkpt lat="48.862741253038955" lon="2.335490834124835">
</trkpt>
<trkpt lat="48.86689310416586" lon="2.323124376331279">
</trkpt>
<trkpt lat="48.86671810266022" lon="2.323062929002894">
</trkpt>
</trkseg>
</trk>
</gpx>
Do you have any ideas as why this happens or how I could debug ?
Another question, I don’t understand why it doesn’t go down the street indicated in blue.
Thanks a lot for your help.