Hi there,
I am wondering what could be the reason (or at least where else I should take a look) that
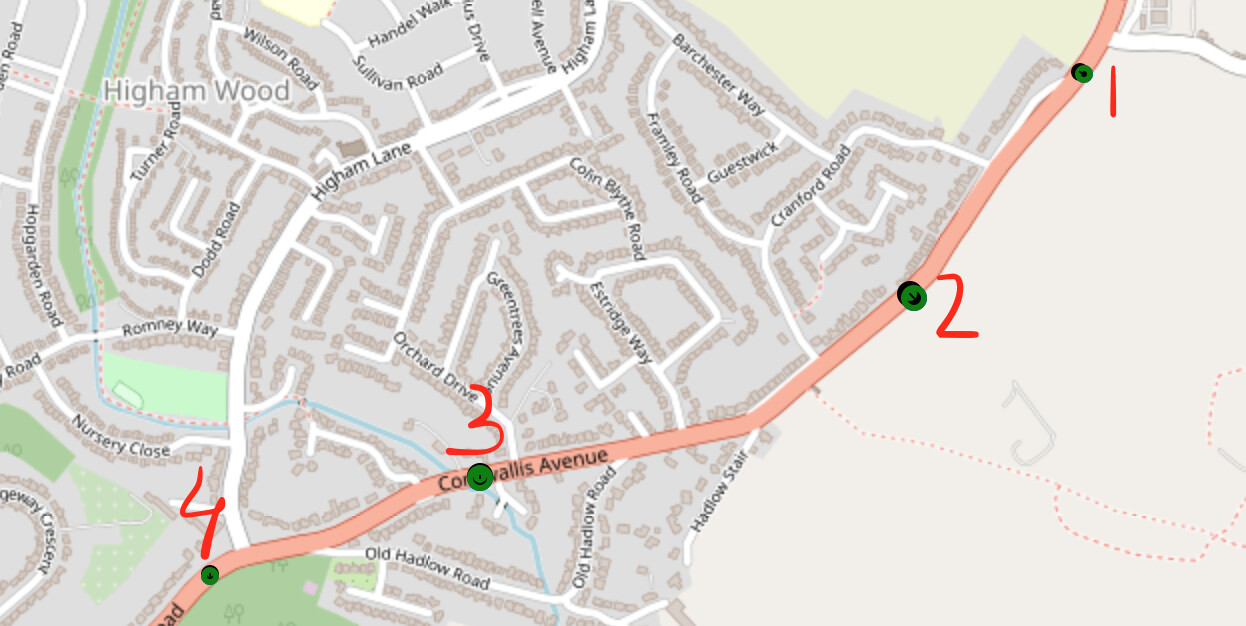
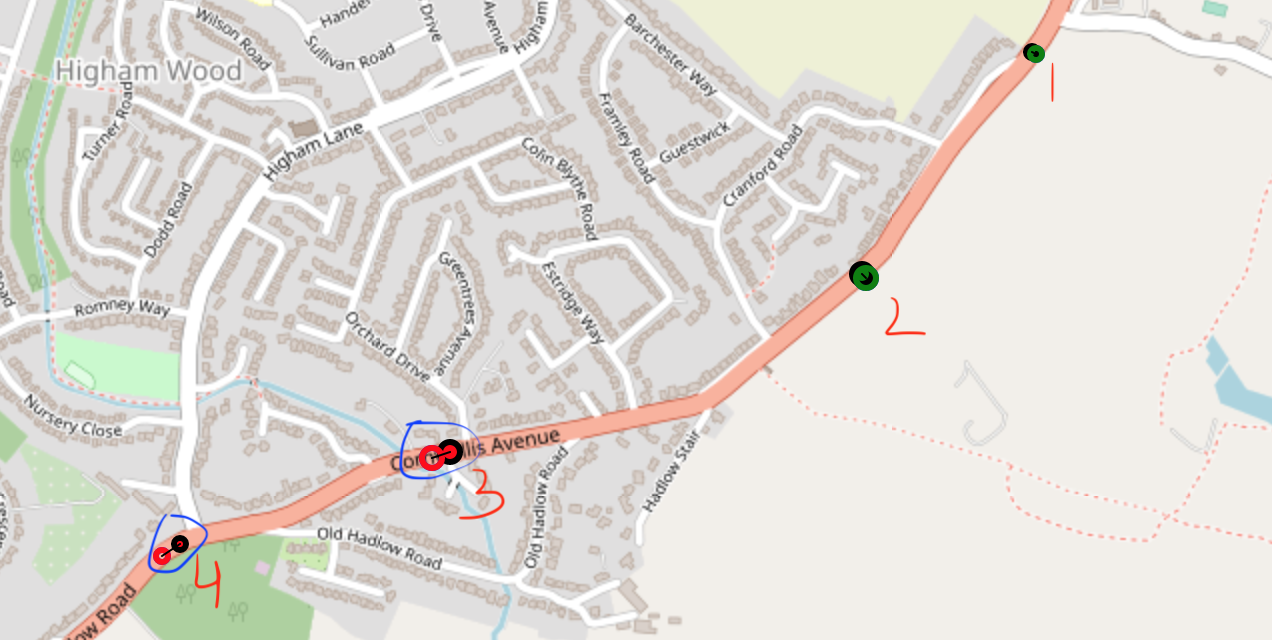
map matcher with measurement sigma = 40m snaps point to Tower Node,
when measurement sigma = 30m provides correct snap to intermediate edge point.
I understand that with 40m tower node got caught and considered as a snap option. But why map matcher (HMM) chooses it instead of the closest result?
Attached are 2 map matching results for same sequence of points. Black points are mapping results. Green or red are original points.


For investigation, I am attaching gpx file. Unfortunately, I cant test it against your API due to the subscription limit.
input.gpx (816 Bytes)